
Treespotte 1
Built on an RC car chassis, this early attempt faced limitations: restricted mounting space, complicated Ackerman steering, and compatibility issues between Intel RealSense cameras and Jetson Nano hardware. I concluded a fresh start was necessary.
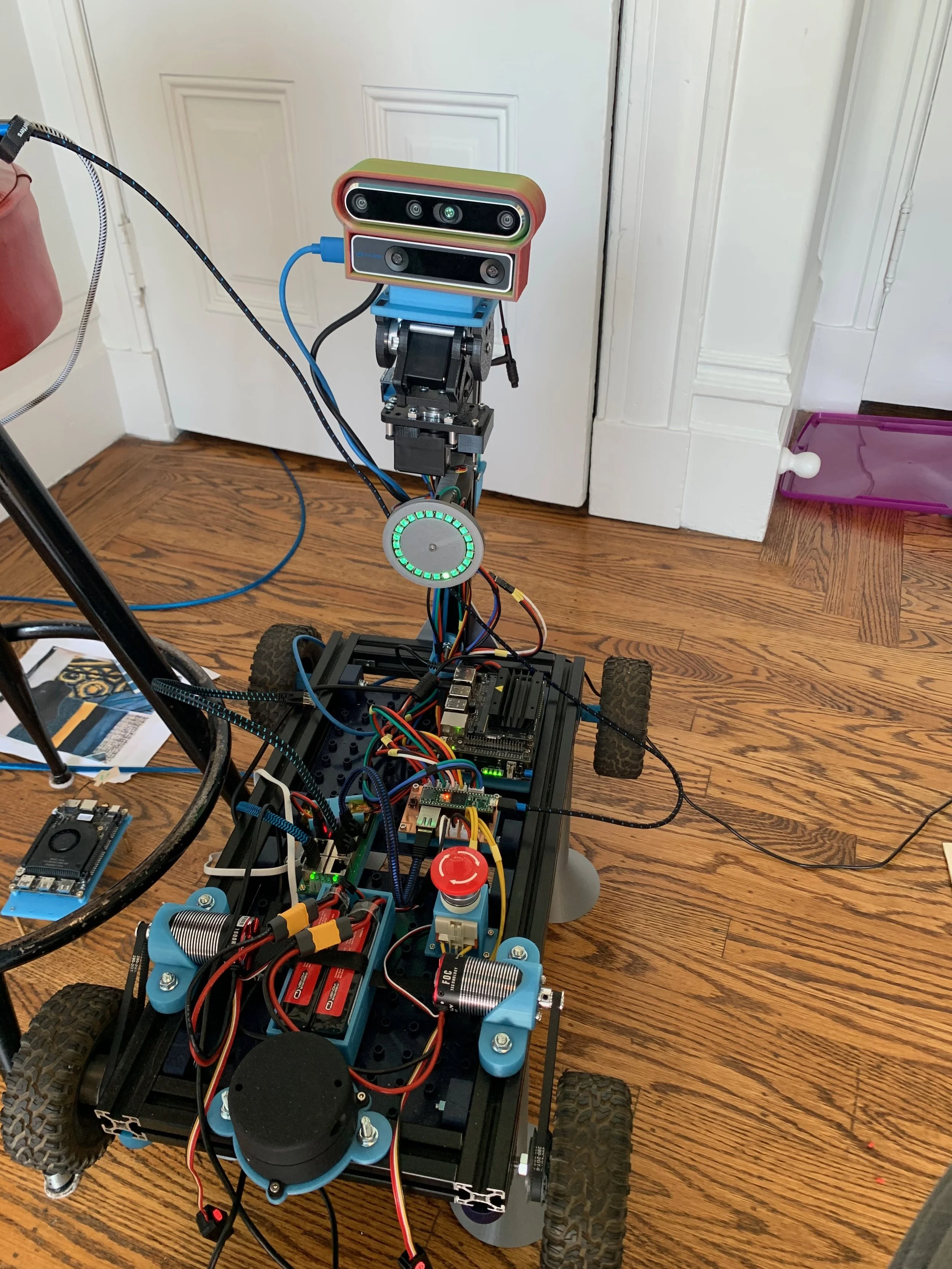
Treespotte 2
This version suffered from excessive complexity: three computing systems (Jetson Nano, Latte Panda Alpha, custom Teensy PCB) created networking complications. The robot became too heavy for its differential drive to maneuver effectively. It was overdone.

Treespotte 3
A success with simplified design: Latte Panda compute, Intel T265 tracking camera, Lidar, and RoboClaw motor controller. The robot successfully maps indoor spaces and navigates autonomously. I forked an old ROS1 driver for RoboClaw compatibility with ROS2.
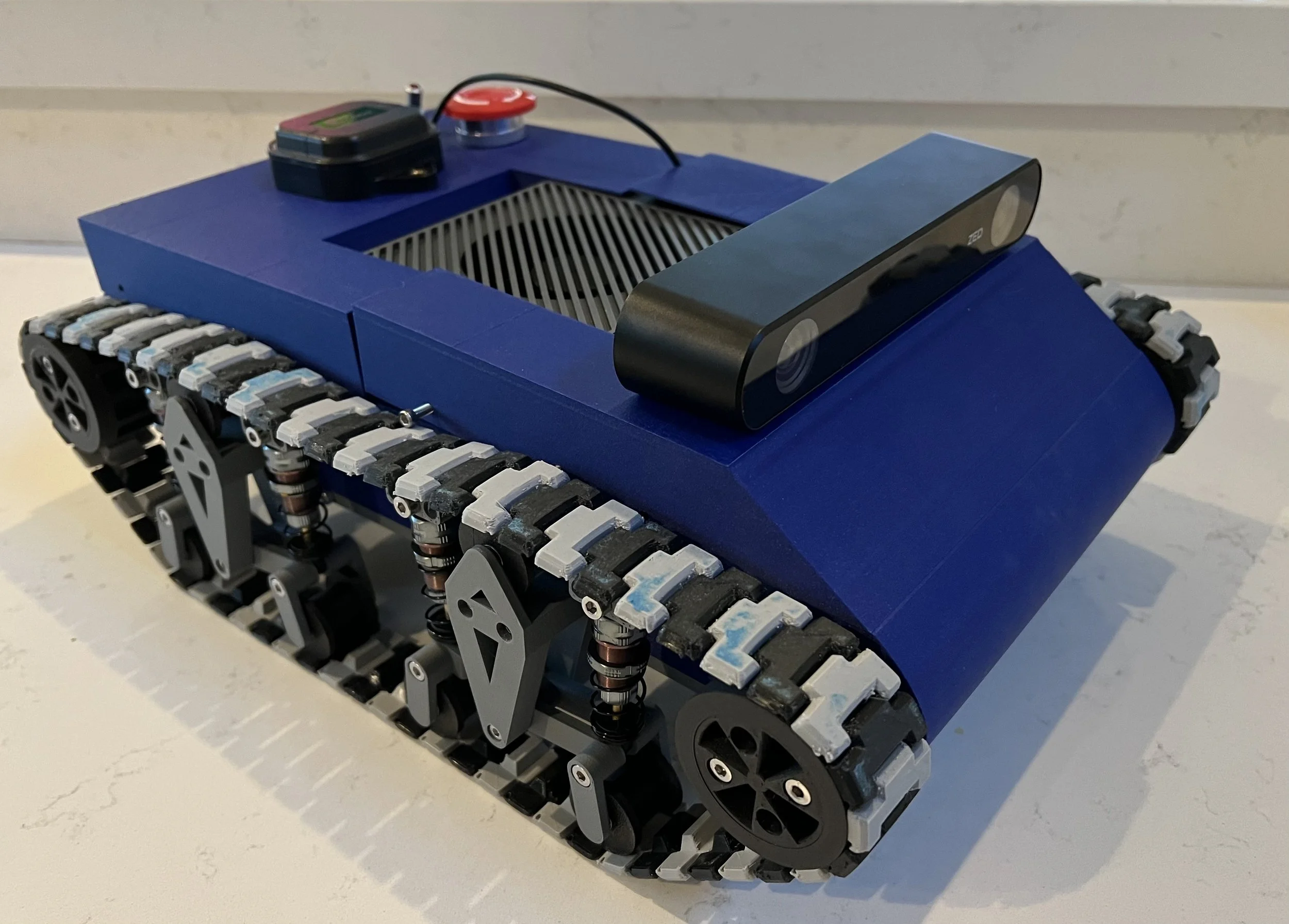
Treespotte 4
Current focus targets outdoor autonomous navigation and object recognition (pine cones, trees). Uses ZED 2i stereo depth camera, GPS integration, and Jetson AGX Orin Developer Kit. Chassis completed April 2022 using 3D-printed PLA parts designed in Fusion 360.